![]()
|
|
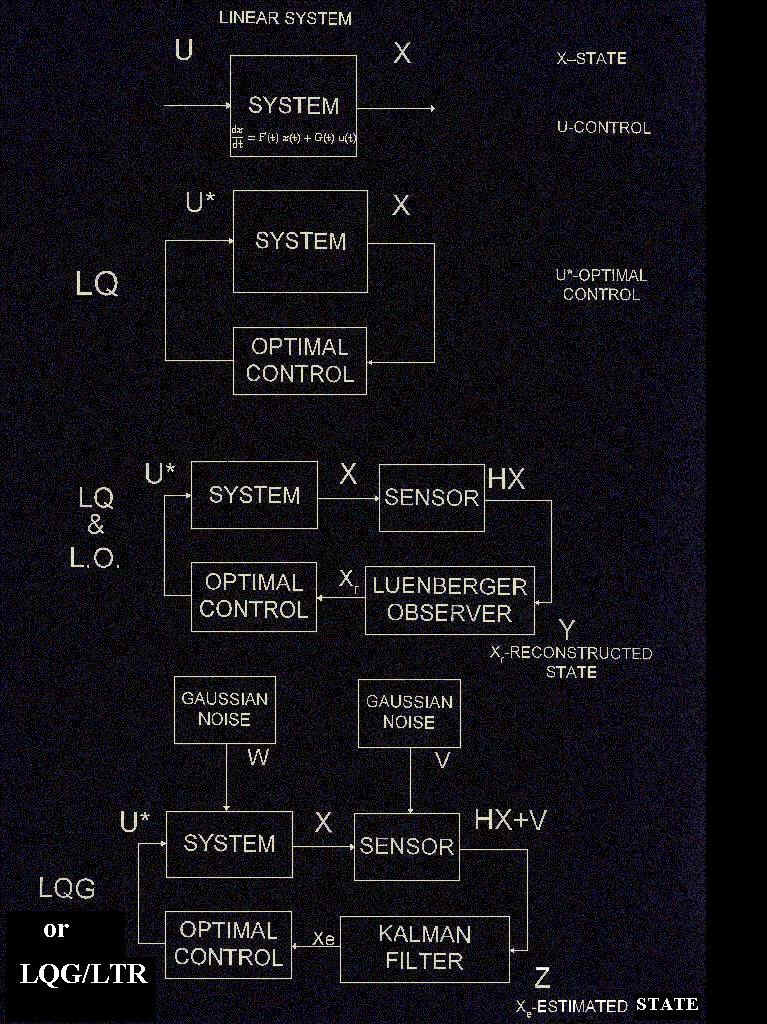
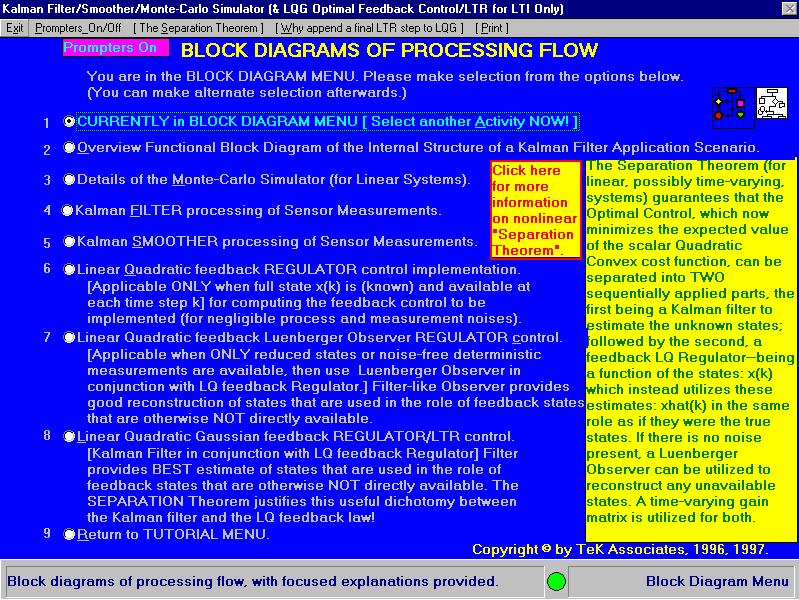
Screen Shot #10 (Merely a picture to illustrate that our GUI is totally self-explanatory) The image below portrays the delineation between the structural situations for those applications that warrant use of a Luenberger Observer (LO) and those that warrant use of a Kalman Filter (KF) and the "regularity conditions" that support its use for applications of state estimation and/or additionally Linear Quadratic (LQ) Minimum Energy Control. Easily accessible explanations of LO are available in Luenberger, D. G., “Dynamic Equations in Descriptor Form,” IEEE Trans. on Automatic Control, Vol. 22, No. 3, pp. 312-321, Jun. 1977, D. G. Luenberger, "An introduction to observers," IEEE Trans. on Automatic Control, Vol. 16, No. 6, pp. 596-602, Dec. 1971, L. M. Novak, "Optimal Minimal-Order Observers for Discrete-Time Systems-A Unified Theory," Automatica, Vol. 8, pp. 379-387, July 1972.
The situation is less encouraging if the original is a nonlinear system with nonlinear measurements; sometimes the corresponding Extended Kalman Filter (EKF) can diverge (unless the initial conditions are close enough to true when it is initialized). If the model is provided in continuous-time form, TK-MIP has the capability to automatically convert it to discrete-time form by USER merely requesting such a conversion by our TK-MIP software (using the well-known conversion rules in
Gelb, Arthur (ed.), Applied Optimal Estimation, MIT Press, Cambridge, MA, 1974.
http://users.isr.ist.utl.pt/~pjcro/temp/Applied%20Optimal%20Estimation%20-%20Gelb.pdf).
The following reference discusses in more detail why the "Separation Theorem" doesn't hold for the case of nonlinear systems: D. L. Alspach, "Dual Control Based on Approximate a' Posteriori Density Functions," IEEE Trans. on Automatic Control, 689ff., Oct. 1972. |
|
TeK Associates Motto: "We work hard to make your job easier!" |