|
Screen shot #12 (Merely a picture to illustrate that our
GUI is totally self-explanatory)
Click here to go to our overview of
Atmospheric Models.
Click here to go to our discussion of
Robust Control Topics.
Click here to see a sampling of topics
discussed and our style of doing so within our self-contained TK-MIP.
Click here to go to our
relevant Anagrams and Palindromes.
 Go to Top
Go to Top
Dr. Paul J. Cefola, the expert referenced above, has a
consultancy in Sudbury, Massachusetts: cefola “at”
comcast.net.
Update on Dr. Paul J. Cefola:
Paul J. Cefola, "Semianalytical Propagation Of Satellite Orbits About An Arbitrary Central Body,"
https://ntrs.nasa.gov/api/citations/20080012674/downloads/20080012674.pdf
Active Member Affiliation(s) within the IAU
Member of Division A Fundamental Astronomy
Member of Division F Planetary Systems and Astrobiology
Member of Commission A2 Rotation of the Earth
Member of Inter-Division A-F Commission Celestial Mechanics and Dynamical Astronomy
Member of Cross-Division A-F Commission Solar System Ephemerides
Past affiliation(s) within the IAU
Past Member of Commission 7 Celestial Mechanics & Dynamical Astronomy (until 2015).
Past Member of Division I Fundamental Astronomy (until 2012).
Click here to get the (draft
copy) of AIAA Standards for Atmospheric Modeling, as specified by the various U.S.and
other International agencies.
With Prompters_On, we are less diplomatic and say what we really
think (and can back-up)! Work on Robust Control over a decade and a half by the
mid 1990's could merely handle Linear Time Invariant (LTI) systems with no nonlinearities, no
time-varying parameters, and no noise disturbances present. The only disturbance
Robust Control could
handle successfully was a persistent constant bias offset. The real world is nonlinear and,
even when locally linearized, it is usually properly modeled as being
time-varying in general. One prominent Laboratory for Information and Decision Systems (LIDS) formulation
at MIT for Robust Control
(Lopez, J. E., Athans, M, “On
Synthesizing Robust Decentralized Control,”
American Control Conference, 1994-TK7855.M41.E3845 no. 2197 at Barker
Library at MIT) requires that the system state dimension, the
number of components of the output measurements, and the number of components of
the control all be of the same exact dimension in common as well as the system being just
LTI.
This formulation is not very realistic (as an understatement since most systems
will not exhibit these characteristics). Yet TK-MIP still reports here on the best that
TeK Associates has found that: (1) heroically handles one scalar nonlinearity in an otherwise
LTI system; (2) heroically handles one scalar time-varying parameter in an
otherwise LTI system; and (3) heroically handles one scalar noise component in
an otherwise LTI system.
Apparently, none of these Robust Control formulations can yet handle all three of these situations simultaneously [in the mid-1990's]. Therefore Robust Control is
evidently a much less
capable methodology than what can be routinely handled in a straightforward
manner within existing standard prior state variable formulations. LTI is
needed to apply the Robust Control methodology since the new toy for
these analysts, consisting of left and right lambda matrix factorizations, are
performed in the frequency domain. By being so very
conservative (in a minimax sense) by how Robust Control handles system control
aspects by single-mindedly focusing on the worse case system characteristics and
then by trying to do the best it can with the worse aspects, the
subsequent system response
is typically very, very sluggish! Few real applications can tolerate such
unpleasantly slow response characteristics except, perhaps, in process control. This
limited applicability should be emphasized more in the Robust Control literature
as a standard disclaimer to the unwary. To date, this has not happened. TeK
Associates is aware that, in 2009, there were about 40 books by
different authors on how to apply Robust Control to applications. In our opinion, if the only objective is a ticket to a technical conference to present
a paper on the subject, then this topic is germane. If the
objective is to solve real-world problems in a timely manner with realistic
resources (as historically had been the goal), then perhaps use of Robust
Control is not the path to follow. (TeK Associates has even actually
overheard [in a public forum prior to the speaker going to participate in a crew
event that weekend at “The
Head of the Charles Regatta”
(at Harvard University but the meeting where this event
took place was not at Harvard)]
this visiting Robust Control and Intelligent
Control researcher’s
flim-flam artist-like response to project funders at the end of the rainbow (to
allow the researcher to save face): “Oops,
the resulting solution is, unfortunately NP-hard, and therefore not
tenable. Sorry!”,
as he
rehearsed and “broadcast
as a shout out”
for others to use as well in similar situations or circumstances. Talk about “biting
the hand that feeds you!”
Is this not welfare for Ph.D.’s?
In a bygone era, control theorists used their considerable intellect to
actually improve the world.
Who, with undue or unwarranted influence, lead them so far astray? Fortunately or
unfortunately, TeK Associates thinks it knows the answer. What was
muttered
in antiquity at the walls of Troy, at the sight of the large wooden horse?
(The above cartoon refers merely to one particular person at
MIT and not to a group or class)
He was
one of several of my personal idols from 1967 for at least two decades until I could see more... (like seeing behind the
wizard's curtain in the Wizard of Oz) and then I became somewhat disappointed
and disillusioned.
With the apparent current lack of technical integrity and
adequate oversight in a closed club, is it any wonder the U.S. is in its current predicament?
[Well that pretty much proves that I have the jaw bone of an ass.... Now all I need to
do is to let my hair grow longer and find a Delilah. Finding one shouldn't be too hard since
so many of them abound.]
I need to properly acknowledge the research team that was able to accomplish
Robust Control solutions via the above cited "heroic" methods: within a 2 year MIT Lincoln Laboratory
funded IR&D contract that was performed ~1991 by Dr. Appa Madiwale
(MIT Lincoln Labatory) and consultant Prof. Lena Valavani
(MIT).
At the 1992 (or was it 1998?) Conference on Decision and Control,
a Robust Control Design Challenge was levied, and several investigators rose to
the challenge and submitted abstracts promising solutions to be presented at the
subsequent year’s Conference on Decision and Control. The
authors who planned to participate with their solutions looked like a who’s who in
modern control. Despite the simplicity of the low dimensional example
comprising the system to be designed for robust control, every anticipated
presenter has a void in the proceedings of this subsequent year’s
conference where the promised
solutions should have appeared. What an embarrassment! This should have been a
reality check early on regarding problems with the robust control methodology. Although the late George Zames is credited in a moving (and extremely informative) tribute
by MIT Prof. Sanjoy Mitter on pp. 590-595 in the May 1998 issue of
IEEE Trans. on Automatic Control with, essentially, single-handedly bringing mathematical functional analysis to the aid of control and system theory via use of the
contraction mapping principle (CMP) in Zames, G., “Feedback and Optimal Sensitivity: model reference transformations, multiplicative semi-norms, and approximate
inverses,” IEEE Trans. on Auto.
Contr., Vol. 26, pp. 744-752, Apr. 1981. (see Bensoussan, A., Stochastic Control by Functional Analysis Methods, Vol. II, North-Holland Publishing, NY,
1982 and see Kreyszig, E., Introductory Functional Analysis with Applications,
John Wiley & Sons, NY, 1978), please peruse the earlier contribution by Jack M.
Holtzman’s (Bell Telephone Lab., Whippany, NJ) Nonlinear System Theory: A Functional Analysis
Approach, Prentice-Hall, 1970, which also has the use of CMP as its main theme in such systems. However, Holtzman worked everything out in detail in
the above cited book so that his results were on a platter in such a form that they could be easily understood and conveniently applied immediately to practical system design by engineering readers faced with real applications and who may not necessarily be interested in abstract results in a technical paper whose significance is not known until several years later. Charles
Desoer’s and M. Vidyasagar’s (U. C., Berkley) textbook came out several years earlier than Zames too and also had a functional analysis bent. A. V. Balakrishnan (UCLA) has also been an avid practitioner of functional analysis in analyzing the behavior of systems and in understanding optimal control (including
his contributions to numerical solution algorithms) since the early
1960’s. There is even another precedent for utilizing a contraction
mapping to converge to the fixed point solution in:
Kerr,
T. H., “Real-Time Failure Detection: A Static Nonlinear Optimization
Problem that Yields a Two Ellipsoid Overlap Test,” Journal of
Optimization Theory and Applications, Vol. 22, No. 4, pp. 509-535,
August 1977.
Again for MIT, the well-known Not Invented Here ("NIH")
syndrome seems to be at play (i.e., only cite work from people affiliated with MIT in some way and
ignore the rest even if they had priority in their results). With this, I keep
my personal promise to the late Dr. Harold Chestnut, VP at General Electric in
Schenectady, NY in the early 1970’s, to be vigilant on these issues
(see Chestnut, H., “Bridging the Gap in Control - Status 1965,”
IEEE Trans. on Automatic Control, Vol. 10, pp. 125-126, Apr. 1965 [and evidently still a problem today if not more so]).
Also see more about Dr. Harold Chestnut in: http://dictionary.sensagent.com/Harold%20Chestnut/en-en/
, https://www.youtube.com/watch?v=Ln9pR1xxB0A
, https://www.youtube.com/watch?v=eyqaBaOrM8g
https://www.bing.com/videos/search?q=harold+chestnut&docid=608046509175016893&mid=5407B3E5A4483462C85E5407B3E5A4483462C85E&view=detail&FORM=VIRE In our opinion, if Control Theorists were actually interested in implementing a
Robust Control, they would embrace the work of the IEEE Reliability Society
(as it has evolved since the end of WWII) by also viewing the problem at a higher level involving the same constituent components participating within the principal path of implementing the solution
and also utilize:
 |
Reliability calculations using Mean-Time-To-Failure
(MTTF) associated with each of the main components occurring/participating in
postulated alternative control system architectures to achieve the same specified goal that is aspired
to; |
| Availability [i.e., reliability with Mean-Time-To-Repair
(MTTR)] for the
above including sensors and transducers and actuators; |
|
use of triple hardware redundancy; |
|
use of voting between components (for three or more identical components); |
|
benefits of "warm standby system" versus
"cold standby system" components; |
|
"m-out-of-n back-up" with identical
components or identical sensors and actuators, where m < n; |
|
"mid-point select strategy" (where warranted for three or more
identical components or identical sensors); |
|
algorithms for "real-time detection" of component or sensor failures; |
|
Inclusion and evaluation of the two types of decision errors incurred: "Probability of Miss" and "Probability of False Alarms" associated with the above detection
algorithms, where Probability of Miss = 1 - Probability of Correct
Detection; |
| Use of system reconfiguration to meet goals (and
[when things go wrong] not merely resort to use of (MIT Aero. & Astro.
Prof. John Deyst's) "analytic redundancy" (Deyst, J. J., A Design Approach to Highly Reliable Flight Control Systems, The Charles Stark Draper Laboratory, Inc., Cambridge, MA,
1975; Montgomery, R. C., and Price, D. B., "Management of Analytical Redundancy in Digital Flight Control Systems for Aircraft,"
AIAA Paper 74-887, Aug. 1974),
which should only be a temporary stop-gap measure for failsafe behavior,
especially since "analytic redundancy" frequently requires (i.e.,
resorts to) more
processing (and consequential time delay) to obtain the missing sensor information
from the equations that model and describe the situation and is therefore more
fragile but still desirable to have as a back-up and internal cross-check or as a type of sanity-check on existing
unfailed sensors as well). It is an excellent idea to utilize and
exploit "analytic
redundancy"; |
|
Use of more realistic "3-state switches" in such reconfigurations, rather than use "ideal switches"
(being idealizations that
never miss and never false alarm), as should be considered in
whole system or
entire system Reliability calculations. |
|
Truthful and vigilant robustness needs to consider all the above aspects as well! |
An example on how to handle such considerations is found in: Kerr,
T. H., “Failure Detection Aids for Human Operator Decisions in a Precision
Inertial Navigation System Complex,” Proceedings of Symposium on
Applications of Decision Theory to Problems of Diagnosis and Repair,
Keith Womer (editor), Wright-Patterson AFB, OH: AFIT TR 76-15, AFIT/EN, Oct.
1976, sponsored by Dayton Chapter of the American Statistical Association,
Fairborn, Ohio, June 1976.
For failsafe or Fault-Tolerant computer capabilities, look to
Stratus Computers (now Stratus Technologies with its [Virtual
Operating System-VOS] and EMC https://www.delltechnologies.com/en-us/index.htm?gacd=9650523-1073-5763017-266683695-0&dgc=st&msclkid=911afd35b7811b5d0e39a256c5dc0dab&gclid=COPC7oKz8OsCFULxswodhf0OuQ&gclsrc=ds)
locally in Massachusetts and nationally to
Tandem Computers and Sequoia (fault-tolerant Unix systems) in California.
They possess hardened operating systems, onboard diagnostic tools, and sophisticated workload-management software that complements the hardware redundancy. Among other things, such fault-tolerant software is designed to prevent the loss of data during failures and to manage tasks such as forced switchovers from a failed system.
See IEE Proceedings A - Physical Science, Measurement and Instrumentation, Management and Education - Reviews ( Volume: 128 , Issue: 4 , pp. 257 - 272, May 1981).
Abstract: The paper reviews the methods by which reliable processing and control can be achieved using fault-tolerant digital computers. The motivation for employing such systems is discussed, together with an indication of current and potential areas of application. The features of fault-tolerant computers are described in general terms, together with a system design procedure specific to the development of a reliable computer. The adherence to a well structured design methodology is particularly important in a fault-tolerant computer to ensure an initially fault-free system. In order to follow this design procedure an intimate knowledge of the following subject areas is required: fault classification, redundancy techniques and their relative merits and reliability
modeling and analysis. These topics are covered in the paper, with particular emphasis being placed upon the implementation of hardware, software, data and time-redundancy techniques. Examples of fault-tolerant computers proposed and produced in the last decade are described. The availability of
Large Scale Integrated circuits (LSI) and, in particular, microprocessors will have a profound effect on the development and application of fault-tolerant computers. The implications of using
LSI in this area are therefore discussed including a brief description of two fundamentally different approaches to the
realization of a fault tolerant microcomputer. https://ieeexplore.ieee.org/document/4644988
Also see: Fault-Tolerant Computing 1 This chapter is based in part on portions of Chapter 8 of “Computer Hardware/Software Architecture,” by Wing N. Toy and Benjamin Zee (Prentice-Hall, 1986), and “Microprogrammed Control and Reliable Design of Small Computers,” by George D. Kraft and Wing N. Toy (Prentice-Hall, 1981) in
Advances in Computers, Elsevier, 1987.
Robust Control methodology (apparently a "new toy" of control theorists
in the last 30 years is evidently of limited applicability in practice since Robust Control implementations have a sluggish response that few applications can tolerate other than those in the process control industry and even then this theory is stymied by presence of nonlinearities, time-varying parameters, or noises).
This new (frequency-domain only) predominately linear Robust Control approach provides
NO new solutions NOR additional applications that it can solve beyond what previous theory already adequately handled (& handled exceptionally better for nonlinear, time-varying, noisy systems, and real systems of higher dimensional state sizes). We acknowledge that there are indeed a few examples where
Robust Control does, in fact, handle a "non-linearity" present in only
one loop, "time-varying" present in only one loop, and "noisy systems" present in only
one loop; but, apparently, can only handle one-situation at a time but only by
"heroic" efforts to date!
While I am not intimidated by measure theory, nor by Lebesgue integrals in rigorous probability theoretic considerations, nor by other stochastic integrals such as that of
Ito or Stratonovich or MacShane, nor by exotic norms in a
Banach Space nor exotic inner products in a Hilbert Space, I fail to see any enticing overriding lure of
Hardy spaces, and especially H∞ for control and/or estimation. I am satisfied and happy with
L1 or L2 convergence or other Lp
spaces, and conjugate exponents: 1/p + 1/q = 1 for related pairs of Lebesgue integrals, L∞, and
Essential Supremum. I am definitely not impressed by "Robust Control" and all its apparent
pretensions. However, some useful motivation for its use is provided here: https://en.wikipedia.org/wiki/Hardy_space
and, subsequently or consequentially, here: https://en.wikipedia.org/wiki/Control_theory. Notice that the language is indeed that of
"process control": slow and steady wins the race as in the story of the "Tortoise and the Hare" (so I did not exaggerate in my earlier criticism of
Robust Control or H∞ estimation as having
an inherently sluggish response similar to the characteristic response of an
"over damped" system rather than to the preferred "critically
damped" 2nd order LTI system that does not exhibit ringing oscillations nor overshoot but quickly
and smoothly goes to the final target state in response to the most recent
set-point value submitted).
While we understand that Lp spaces have pathologies when p <
1, that Hp spaces don't exhibit when p < 1 (useful for further mathematical analysis but not related to
Control Theory applications [even for process control], we are less
enthusiastic concerning use of Hp spaces for practical engineering
applications).
For the inner and outer loops of Fighter Aircraft guidance and
control, several generations of linkages have evolved since Generation 1: pneumatic linkages and mechanical levers to exercise control actuators;
through Generation 2: fly-by-wire (electrical cables) to exercise control actuators;
to Generation 3: fly-by-light (i.e., fiber optic links) to exercise control actuators. Fiber optic cables would previously be bleached and turn cloudy (interfering with successful communications transmission) upon exposure to a nuclear environment unless they were doped with a
"Halide" such as fluorine. There are now more modern solutions to that historical problem. M.
G. Safonov and M. K. H. Fan, eds., Special Issue on Multivariable Stability Margin.
International Journal of Robust and Nonlinear Control, Vol. 7, pp. 97–103 (1997).
http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.731.5673&rep=rep1&type=pdf
Kevin A. Wise, "Bank-to-turn missile autopilot design using loop transfer recovery,"
AIAA Journal of Guidance, Control, and Dynamics, Vol. 13, No. 1, pp. 145-152, Jan-Feb. 1990.
https://arc.aiaa.org/doi/10.2514/3.20528
Published Online:23 May 2012 https://doi.org/10.2514/3.20528
As TeK Associates has observed or warned earlier here and elsewhere, that
Loop Transfer Recovery (LTR) for LQG can only be invoked or implemented for
LTI (Linear Time Invariant) systems. This is not likely the case for Bank-to-Turn missiles (except, maybe, only for one
mode as a less realistic case).
Christopher I. Marrison and Robert F. Stengel, "Design of Robust Control Systems for a Hypersonic Aircraft,"
AIAA Journal of Guidance, Control, and Dynamics, Vol. 21, No. 1, pp. 58-63, Jan-Feb 1998.
https://arc.aiaa.org/doi/abs/10.2514/2.4197
Published Online:23 May 2012 https://doi.org/10.2514/2.4197
Perhaps use of "Gain Scheduling" of various PID controllers (optimized for useful control of specific regions of the linearized nonlinear system) will
suffice for many useful practical applications. Smooth transitions in switching between
different design "set points" will also need to be included in the
implementation. Finally, the utility of the particular "Gain Scheduled" PID implementations should be demonstrated by copious simulations of the
exact
nonlinear system, as controlled by the PID Gain schedule, to verify that the resulting design is adequate for the intended
nonlinear application.
For more insight into "Gain Scheduling", please
click on:
https://www.mathworks.com/videos/gain-scheduling-of-pid-controllers-68883.html
https://www.mathworks.com/help/slcontrol/ug/gain-scheduled-control-systems.html
Gain Scheduling Basics: Gain scheduling is an approach to control of nonlinear systems using a family of linear controllers, each providing satisfactory
control for a different operating point of the system. Gain-scheduled control is typically implemented using a controller whose gains are automatically
adjusted as a function of scheduling variables that describe the current operating point.
We at TeK Associates are optimistic about the status of
control theory in general and we are enthusiastic about:
|
Bossert, D. E., Lamont, G. B., Horowitz, I., “Design
of Discrete Robust Controllers using Quantitative Feedback Theory and a
Pseudo-Continuous-Time Approach,”
on pp. 25-31 in Osita D. T. NWOKAH (Ed.), Recent
Developments in Quantitative Feedback Theory: Work by Prof. Issac Horowitz
(predating research in Robust Control by two decades),
presented at the winter annual meeting of the American Society of Mechanical
Engineers, Dallas, TX, 25-30 Nov. 1990; |
|
Barnard, R., “A Quantitative Feedback
Theory Based on Time Domain and Fixed Point Notions (as
a consequence of contraction mappings encountered),”
on 45ff. in Osita D. T. NWOKAH (Ed.), Recent
Developments in Quantitative Feedback Theory: Work by Prof. Issac Horowitz,
presented at the winter annual meeting of the American Society of Mechanical
Engineers, Dallas, TX, 25-30 Nov. 1990; |
|
Intelligent Control and Adaptive Systems, Ed./Chair
Guillermo Rodriguez, Proceedings of SPIE-The International Society
for Optical Engineering, Vol. 1196, Bellingham, WA, 7-8 Nov. 1989; |
|
Butkovskiy, A. G., Pustyl'nikov, A. M., Mobile Control of
Distributed Parameter Systems, Ellis Horwood Ltd., Chichester, Halstead
Press, division of John Wiley, NY, 1997 (especially
see Appendix 6 for 23 varieties of Integral Transforms on pp. 249-267;
Appendix 7: Sobolev Transform; Appendix 12: On an Approximation
Investigation of Mobile Control Problems for Distributed Control); |
|
Becedas, J., Mamani, G., Feliu, V., Siva-Ramirez, H., “Estimation
of Mass-Spring-Damper System,”
in Advances in Computational Algorithms and Data Analysis, S.-I.
Ao, B. Kieger, S.-S. Chen (Eds.), Springer Science &
Business Media, 2009; |
|
Schlacher, K., Irschik,
H., Kugi, A., “Control
of Nonlinear Beam Vibrations by Multiple Piezoelectric Layers,”
pp. 355-362 in IUTAM Symposium on Interaction between Dynamics and
Control in Advanced Mechanical Systems, D. H. VanCampen (Ed.), Kluwer
Academic Publishers, Netherlands, 1997; |
| Hajek, O., Control
Theory in the Plane, 2nd Edition, Lecture Notes in Control and Information
Sciences, Springer-Verlag, NY, 2009; |
| Ching, S.-N., Eun,
Y., Gokcek, C., Kabamba, P. T., Meerkov, S. M., Quasilinear Control:
Performance analysis and design of feedback systems with nonlinear sensors
and actuators, Cambridge University Press, Cambridge, UK, 2011. |
To complete the expose started above, recall the creatively designed endeavor
below which featured a multiple model bank of N Kalman filters in parallel with an
LQ feedback regulator control law for each Kalman filter equipped feedback
branch after which the aggregated net result of the particular
scalar weightings consisting of the individual probabilities, as calculated on-line in
real-time, and corresponding to any particular branch of the LQG being correctly
associated with the present mode (of only N different possible modes being
modeled) for the actual multi-mode system under consideration:
Athans, M., Castanon, D., Dunn, K.-P., Lee, W. H., Sandell, N.
R., Willsky, A. S., “The Stochastic Control of the F-8C
Aircraft using a Multiple Model Adaptive Control (MMAC) method - I: Equilibrium
Flight,”
IEEE Trans. on Automatic Control, Vol. 22, No. 5, pp. 768-780, Oct. 1977.
Was non-equilibrum flight ever considered or handled
(where non-equilibrium flight is take-offs and landings and dog fight maneuvers
or even maneuvers as benign as just coordinated turns)? Did
this approach actually work? Was there ever a Phase II follow-on thus indicating
success of the particular approach? The answer appears to be “no”
on all three counts. This constitutes a high profile publicity stunt or charade without any
useful payoff to the NASA customer. This was business as usual in some circles!
I definitely would like to chase the money changers from the temple (of learning
and useful knowledge). If they had not been pretending so hard that LQG
theory was not fatally flawed, they could have equipped each LQG leg with a
stable replacement LQG/Loop Transfer Recovery, as its correction. The resulting
redesign may now actually work as they had hoped the initial version would.
Perhaps the funniest situation was when several people complained that the IEEE
TAC paper review system was, perhaps, apparently being abused by reviewers
or assistant editors being the first to see and then recognize a significant new
result and then dispatch a graduate student (among an ample pool of available
talent) to either use the topic of the paper under review as their thesis or
write a paper on the topic themselves and then submit it for publication even
before the original paper had appeared in print for the first time (a process
that took about two years in those days). Afterwards, people at a particular
institution would just reference the work of the authors affiliated with the
same institution and ignore the true originator (who should have been
acknowledged as having had the precedent) as yet another example of the "NIH" syndrome.
What was funny was who was on the two man committee: Prof. Michael Athans and Prof. Y.-C. "Larry" Ho
[one who almost always indulged in
"NIH" behavior and the other who didn't and was known for his steadfast
integrity, respectively]
to look into the possible
problem and who jointly reported their conclusions that everything regarding the current IEEE
TAC review process was just fine! Isn't that particular situation like
“having
the fox guard the chicken coop?”
In the old days (1970's and, perhaps, before), in order for a Navy
Sea Hawk SH-60 helicopter to land on a ship's deck during
high winds and a corresponding "high sea state", it would drop a strong
steel cable that would be attached to a winch aboard ship. Then the helicopter would pull
up against the cable to make the cable taught as the winch reeled it in. In that way, the helicopter would perfectly match the ship's motion on roughest of
seas as it landed. RAN MH-60 Helicopter RAST Recovery Assist Explained:
https://www.youtube.com/watch?v=6XvdXwgYN_s
Years later (~1990's), I heard a presentation by (the late) Prof. Mike Athans at
MIT (& Alphatech), where there was an attempt to do everything without the cable and, instead, rely only on a laser radar down and retroreflector-based back bounce control law for the landing. Even though I did not observe a cable in
the above video, I still suspect that the complicated approach just described was not used here. The cable approach is robust and straight-forward. Judging by the way the helicopter moves perfectly to match the heaving of the ship's deck without any apparent computational delay (that would be incurred if a laser radar and a control law implementation were jointly used to control the helicopter's landing), I strongly suspect that there is a cable present. Modern cables can be made of carbon "Buckyballs"
now for sufficient tensile strength without being easily visible to the naked eye. (At least it is something useful and
a practical application for Buckyballs instead of a somewhat controversial (understatement)
hypothesized "Space Elevator".
Click to view Japan's solution: https://www.youtube.com/watch?v=ZAjyBUnO9QY
One further example: I am
not accusing all of MIT of practicing "NIH" but am only complaining about the inner workings of one particular department that I am very familiar with:
Electronic Systems Laboratory (ESL), which changed its name to
Laboratory for Information and Decision Systems (LIDS). My complaint is only for
a particular time epoch from the late 1960's until some aspects of the
present and does not include or apply to everybody working in this department, nor
to the students who graduated from this department; but merely to the
"trickster" at the top for many of those years [who was also a brilliant teacher and insightful researcher with extensive breath and depth and an ability to communicate ideas simply and clearly so that
ALL could
understand]. (My own
[115]
was based on some of his earlier work.) However, in the 1990's, he even
told his graduate students in class (which I overheard, as an outside member of the audience)
how he handled the following situation: "One of my prior students, who had
already graduated and was now working in industry, in seeking to apply some aspect
of my prior published technique to a particular application in seeking to apply my
earlier results to but then, unfortunately, encountered a problem in taking it to fruition in the manner expected.
This graduate, now in industry, successfully persuaded his supervisor
to finance a consulting visit for me to help resolve the problem and
help them get over the perceived temporary hurdle. While there on location, I sought a private audience with my prior student's supervisor from whom this employee,
got that consulting assignment for me; I told his supervisor that he "was not the sharpest knife in the
drawer"!" Again, “biting the hand that feeds
him!” Paying back an act of kindness by throwing his former student "under
the bus". Prof. Michael Athans' meaning was clear: "If you
bother me with some theoretical aspect or "wrinkle" associated with the material
of this course after you leave here, I will do the same thing to you!"
Usually, subsequent consulting work on the same topics and material already
known and conveyed in prior classes on the subject is viewed as
an opportunity to be a hero and "save the day" for its
industrial application! It's a pity that
Prof. Athans, apparently, did not view it that way. Perhaps later in life, he
was merely too busy and did not want to interrupt what he was working on at the
time. I will remember the fun times (e.g., at several meetings of the CDC in New Orleans, as he crossed Canal Street, with an impish grin on his face,
and as he proceeded down
Bourbon Street with Sol Gully [https://www.linkedin.com/in/sol-gully-4779a326] to take in some of the many
performances there). Prof. Athans had a very
colorful personality. He will indeed be missed!
We at TeK Associates consider ourselves to have been extremely lucky
for over more than forty years by our employers being in convenient proximity of two major educational institutions of higher learning where outstanding leaders in control theory
taught; and who allowed us to attend important outside lecturers and presentations for free at both
Harvard University (where Y. C. "Larry" Ho allowed us to hear but not ask questions
nor make comments) and MIT (where we were allowed to ask probing questions). We also had library cards at both institutions, which greatly aided our
research into these subjects. Weekly attendance at TASC "White Noise
Hours" also provided us with experience more encompassing than our own mere first-person experience
because we benefited from direct cross-corroboration
with others who had different challenges. I also frequently used the Engineering
and Science Library at Boston University, the Snell Library at
Northeastern University, the Air Force Geophysical Library at Hanscom
Field AFB (which became the Phillips Library) before it all
moved to Albuquerque, New Mexico, the Lincoln Laboratory Library
while I was working there, and the MITRE library in Bedford, MA
(while I was consulting there) before it was dismantled in the early 2000's to
be merely a "shadow of its former self".
Another variation of sorts of the
dreaded NIH syndrome, discussed above, occurs in the following:
|
Smith, S. T., “Statistical Resolution Limits and the
Complexified Cramer-Rao Bound,” IEEE
Trans. on Signal Processing, Vol. 53, No. 5, pp. 1597-1609, May 2005.
|
Smith, S. T., “Covariance, Subspace, and Intrinsic
Cramer-Rao Bounds,” IEEE
Trans. on Signal Processing, Vol. 53, No. 5, pp. 1610-1630, May 2005.
|
|
where no reference is made to the
following prior publication on this Cramer-Rao Lower Bound topic:
|
Kerr, T. H., “Status of CR-Like Lower bounds for
Nonlinear Filtering,” IEEE Transactions on Aerospace and Electronic
Systems, Vol. AES-25, No. 5, pp. 590-601, September 1989 (Author’s
reply in Vol. AES-26, No. 5, pp. 896-898, September 1990).
|
yet several of the references cited in the
above papers by Stephen Smith (of the Lincoln Laboratory of MIT) do, in fact,
reference the above Kerr article as a significant historical precedent in the
Cramer-Rao Lower Bound topic area that was published in a different IEEE Journal
even though Kerr was in fact an employee of Lincoln Laboratory when his paper
was published but is no longer (for good reasons such as this).
Substantiation of its significance may be found on page 9 in: Branko
Ristic, “Cramer Rao Bounds for Target
Tracking,” International
Conference on Sensor Networks and Information Processing, 6
Dec. 2005.
No there is not “a new sheriff in town”
since THK III has pretty much been here and on station all along with eternal
vigilance since 1971: “Making a list and checking it twice---trying to find out
who’s naughty or nice...(You can run
but you can't hide!)”
| Click
here to view our recent short comment submitted to the Institute of
Navigation for publication in their Journal. Kerr,
T. H., “Comment on
'Low-Noise Linear Combination of Triple-Frequency Carrier Phase Measurements',”
Navigation: Journal of the Institute of Navigation,
Vol.57, No. 2, pp. 161,162, Summer 2010. |
| Kerr, T. H., “Comment on
‘Precision Free-Inertial Navigation with Gravity Compensation by an Onboard
Gradiometer’,”
AIAA Journal of Guidance, Control, and Dynamics,
July-Aug. 2007. |
| Kerr, T. H., “Comments on ‘Determining if Two Solid Ellipsoids
Intersect’,” AIAA Journal of Guidance, Control, and Dynamics,
January-February 2005. |
| Kerr, T. H., “Further Critical Perspectives on Certain Aspects of GPS Development
and Use,” Proceedings of 57th Annual Meeting of the Institute of
Navigation, 9-13 June 2001. |
| Kerr, T. H., “Sensor Scheduling in Kalman Filters: Evaluating a Procedure for
Varying Submarine Navaids,” Proceedings of 57th Annual Meeting
of the Institute of Navigation, 9-13
June 2001. |
| Kerr, T. H., “Vulnerability of Recent GPS Adaptive Antenna Processing (and all
STAP\SLC)
to Statistically Non-Stationary Jammer Threats,”
Proceedings of
SPIE, Session 4473: Tracking Small Targets, 29 July-3 August 2001. |
| Kerr, T. H., “Exact Methodology for Testing Linear System Software Using Idempotent
Matrices and Other Closed-Form Analytic Results,” Proceedings of
SPIE, Session 4473:
Tracking Small Targets, 29 July-3 August 2001. (closed-form
analytic solutions and IMM critique near the end) |
| Kerr, T. H., “New Lamps for Old: a shell game for generalized likelihood
ratio use in
radar? Or this isn’t your father’s GLR!,” Proceedings of
SPIE, Session 4473: Tracking Small Targets, 29 July-3 August 2001. |
| Kerr, T. H., “TeK Associates’ view in comparing use of a recursive Extended Kalman Filter
(EKF) versus use of Batch Least Squares (BLS) algorithm for
UEWR,” TeK
Associates, Lexington, MA, (for Raytheon, Sudbury, MA), 12 Sep. 2000. |
| Kerr, T. H., “Considerations in whether to use Marquardt Nonlinear Least Squares vs. Lambert Algorithm for NMD Cue Track Initiation (TI)
Calculations,”
TeK Associates Technical Report No. 2000-101, Lexington, MA, (for Raytheon, Sudbury, MA), 27 Sep. 2000. |
| Kerr, T. H., “Critique of Some Neural Network Architectures and Claims for Control
and Estimation,” IEEE
Transactions on Aerospace and Electronic Systems, April 1998. |
| Kerr, T. H., “Comments on ‘An Algorithm for Real-Time Failure Detection in Kalman
Filters’,” IEEE Trans. on Automatic Control, May
1998. |
| Kerr, T. H., “A Critical Perspective on Some Aspects of GPS Development
and Use,” Proceedings of 16th Digital Avionics System Conference,
Vol. II, pp. 9.4-9 to 9.4-20, Irvine, CA, 26-30 Oct. 1997. [all
worries expressed here by the author regarding GPS vulnerabilities were
confirmed in experience in Three W. Mark Barnes, "Artillery Surveyors:
Nomads of the Battlefield," Field Artillery, A Professional Bulletin
for Redlegs, HQDA P B6-01-1, pp.43-47, Jan.-Feb. 2001] |
| Kerr, T. H., “Extending Decentralized Kalman Filtering
(KF) to 2D for Real-Time
Multisensor Image Fusion and\or Restoration: Optimality of Some
Decentralized KF Architectures,” Proceedings of the
International Conference on Signal Processing Applications & Technology
(ICSPAT96), 7-10 October 1996. |
| Kerr, T. H., “Assessing and Improving the Status of Existing Angle-Only Tracking
(AOT)
Results,” Proceedings of the International Conference on Signal
Processing Applications & Technology (ICSPAT), 24-26 October 1995. |
| Kerr, T. H., “Use of GPS\INS in the Design of Airborne Multisensor Data Collection
Missions (for Tuning NN-based ATR algorithms),”
Institute of
Navigation Proceedings of GPS-94, 20-23 Sept. 1994. |
| Kerr, T. H., “Emulating Random Process Target Statistics (using
MSF),” IEEE Transactions on Aerospace and Electronic Systems,
Vol. 30, No. 2, pp. 556-577,
April 1994. (closed-form analytic solutions and
critique in Appendix) |
| Kerr, T. H., “Streamlining Measurement Iteration for EKF Target
Tracking,”
IEEE
Transactions on Aerospace and Electronic Systems, March
1991. |
| Kerr, T. H., “An Invalid Norm Appearing in Control and
Estimation,” IEEE
Transactions on Automatic Control, Vol. 23, No. 1, Feb. 1978. (counterexamples and a correction) |
| Kerr, T. H., “Testing Matrices for Definiteness and
Application Examples that Spawn the Need,”
AIAA Journal of Guidance, Control, and Dynamics, Vol. 10, No. 5, pp.
503-506, Sept.-Oct., 1987. |
| Kerr, T. H., “Rationale for Monte-Carlo Simulator
Design to Support Multichannel Spectral Estimation and/or Kalman Filter
Performance Testing and Software Validation/Verification Using Closed-Form
Test Cases,”
MIT Lincoln Laboratory Report No. PA-512, Lexington, MA, 22 December 1989 (BSD). |
| Kerr, T. H., “Status of CR-Like Lower bounds for
Nonlinear Filtering,” IEEE
Transactions on Aerospace and Electronic Systems, Vol. 25, No. 5, pp.
590-601, Sep. 1989. (an expose) |
| Kerr, T. H., “On Misstatements of the Test for
Positive Semidefinite Matrices,”
AIAA Journal of Guidance, Control, and Dynamics, Vol. 13, No. 3, pp.
571-572, May-Jun. 1990. (occurring in Nav & Target Tracking s/w in
‘70’s/’80's). |
| Kerr, T. H., “Fallacies in Computational Testing of
Matrix Positive Definiteness/Semidefiniteness,”
IEEE Transactions on Aerospace and Electronic Systems, Vol. 26, No.
2, pp. 415-421, Mar. 1990. [Using counterexamples, he identifies fallacious
algorithms that he found to exist in U.S. Navy submarine navigation and
sonobuoy operational software that he reviewed in the late 1970's and early
1980's.] |
| Kerr,
T. H., “Computational Techniques for the Matrix
Pseudoinverse in Minimum Variance Reduced-Order Filtering and Control,”
in Control and Dynamic Systems-Advances in Theory and Applications,
Vol. XXVIII: Advances in Algorithms and computational Techniques for Dynamic
Control Systems, Part 1 of 3, C. T. Leondes (Ed.), Academic Press, NY, 1988. |
| Kerr, T. H., “Decentralized Filtering and Redundancy
Management Failure Detection for Multi-Sensor Integrated Navigation Systems,”
Proceedings of the National Technical Meeting of the Institute of
Navigation (ION), San Diego, CA, 15-17 January 1985. (an expose)
|
| Kerr, T. H., “Decentralized Filtering and Redundancy
Management for Multisensor Navigation,”
IEEE Trans. on AES, Vol.23, No. 1, pp. 83-119, Jan. 1987. (an expose) |
| Kerr, T. H., “Examining the Controversy Over the
Acceptability of SPRT and GLR Techniques and Other Loose Ends in Failure
Detection,” Proceedings
of the American Control Conference, San Francisco, CA, 22-24 June 1983.
(an expose) |
| Kerr, T. H., “Comments on ‘A Chi-Square Test for
Fault Detection in Kalman Filters’,”
IEEE Transactions on AC, Vol. 35, No. 11, pp. 1277-1278, November
1990.
|
| Kerr, T. H., “A Critique of Several Failure Detection
Approaches for Navigation Systems,”
IEEE Transactions on AC, Vol. 34, No. 7, pp. 791-792, July 1989. |
| Kerr, T.H., and Chin, L., “The Theory and Techniques
of Discrete-Time Decentralized Filters,”
in Advances in the Techniques and Technology in the Application of
Nonlinear Filters and Kalman Filters, edited by C.T. Leondes,
AGARDograph No. 256, Noordhoff International Publishing, Lieden, 1981. |
| Kerr, T. H., “The Proper Computation of the Matrix
Pseudo-Inverse and its Impact in MVRO Filtering,”
IEEE Trans. on Aerospace and Electronic Systems, Vol. 21, No. 5, Sep.
1985.
|
| Kerr, T. H., “The Principal Minor Test for
Semidefinite Matrices-Author’s Reply,”
AIAA Journal of Guidance, Control, and Dynamics, Vol. 13, No. 3, p.
767, Sep.-Oct. 1989. |
| Kerr, T. H., “Three Important Matrix Inequalities
Currently Impacting Control and Estimation Applications,”
IEEE Transactions on Automatic Control, Vol. AC-23, No. 6, December
1978. |
| Kerr, T. H., “Functional and Mathematical Structural
Analysis of the Passive Tracking Algorithm (PTA),”
Intermetrics Report No. IR-MA-208, Cambridge, MA, 25 May 1983, for NADC. |
| Kerr, T. H., “Comments on ‘Estimation Using a
Multirate Filter’,”
IEEE Transactions on Automatic Control, Vol. AC-34, No. 3, p. 384,
March 1989. |
| Kerr, T. H., “Comments on ‘Federated Square Root
Filter for Decentralized Parallel Processes’,”
IEEE Transactions on Aerospace and Electronic Systems, Vol. AES-27,
No. 6, November 1991.
Go to Top |

Explanations pop-up instantaneously where you need them but
only when requested, as seen below for the single button appearing on the screen
above. An exception is if the USER sets Prompters_On as an option that can be
activated from the Menu Bar appearing on most of the primary Screens. When
Prompters_On is set, many of the informational screens open automatically when
that screen is visited as a helpful mnemonic device. This feature is especially
useful when a substantial period of time elapses between TK-MIP activation as
other tasks are being pursued. No user manual is ever necessary to feel
comfortable and confident in running TK-MIP. This prompting does not make use of
the Internet. Otherwise TK-MIP could not be run in a secure stand-alone
CLASSIFIED mode. The close (equivalent) model relationship
between a Box-Jenkins time-series representation and a state variable
representation has been known for a least 4 or 5 decades, as spelled out
in: A. Gelb (Ed.), “Applied
Optimal Estimation,”
MIT Press, Cambridge, MA, 1974.
| Kerr, T. H., “Applying Stochastic Integral Equations to Solve a Particular Stochastic Modeling
Problem,” Ph.D. Thesis in the Department of Electrical Engineering, University of Iowa, Iowa City, Iowa, January 1971.
(This offers a simple algorithm for easily
converting an ARMA time-series into a more tractable AR one of higher
dimension.) |
| Kerr,
T. H., Multichannel Shaping Filter Formulations for Vector Random Process
Modeling Using Matrix Spectral Factorization,
MIT Lincoln Laboratory Report No. PA-500, Lexington, MA, 27 March
1989. (This offers a simple algorithm for easily
converting an ARMA time-series into a more tractable AR one of higher
dimension.) |
| Kerr, T. H., “Emulating
Random Process Target Statistics (Using MSF),” IEEE
Trans. on Aerospace and Electronic Systems, Vol. 30, No. 2, pp. 556-577,
Apr. 1994. (This offers a simple algorithm
for easily converting an ARMA time-series into a more tractable AR one of
higher dimension.) |
Please click this for a
simple overview perspective.
Update:
Now 50 years of experience with Kalman Filter applications and he is an IEEE
Life Senior Member and an Associate Fellow of the AIAA in GNC and a
Member of SPIE. https://spie.org/profile/Thomas.KerrIII-2982?SSO=1
The buttons depicted in the screen immediately above represent a dynamic application overview available to the seated
operator (in blue silhouette) at a console who is keeping abreast of the situation. When
our TK-MIP USER clicks these particular buttons,
a short unclassified video segment is played depicting the dynamics of the indicated application performing
properly, as designed.
Please click on http://filext.com/file-extension/TEK
for free ways to check your Window's registry for compatibility with TK-MIP and
its ability to automatically access the various file extensions that it needs to
access (as representatively sampled in the file view above) in order that TK-MIP
work properly without conflict after it is installed.
Please click on http://filext.com/file-extension/TEK
for free ways to check your Window's registry for compatibility with TK-MIP and
its ability to automatically access the various file extensions that it needs to
access (as representatively sampled in the file view above) in order that TK-MIP
work properly without conflict after it is installed.
Go to Top
Sh, Tom sees moths.
Are we not drawn onward to new era?
To Idi Amin. I'm a idiot.
Splat! I hit Alps.
Norma is as selfless as I am, Ron.
radar
TACO CAT
racecar
|
Hardware Options for
sequential real-data inputs to TeK Associates' TK-MIPTM
Software |
|
Other NI conventions using
various USB types now exist:
https://www.ni.com/en-us/shop/hardware/usb-category.html#
Others offer Data Acqusition solutions too:
https://www.dmcinfo.com/services/test-and-measurement-automation?view=fxfdhi1hsoqifbuxbefgk9koqy67hwfd&gclid=EAIaIQobChMIiLyUxYrm8QIVDZezCh0dOwq1EAAYAiAAEgJ0U_D_BwE
DMC leverages a variety of programming platforms for success in Test & Measurement solutions. These include
LabVIEW and text-based languages (Python,
LabWindows/CVI, Measurement Studio, .NET, ASP.NET, C#,
C++, C, Java, and more).
Identifying other DAC approaches that are compatible with Visual Basic:
Marvin Test Solutions's ATEasy:
https://www.marvintest.com/Product.aspx?model=ATEasy&Tab=Whats+New?
https://www.remak.it/wp-content/uploads/2012/04/Geotest_ATEasy8_GettingStarted.pdf
https://www.marvintest.com/ateasy25
https://www.marvintest.com/KnowledgeBase/default.aspx?task=go&search=ateasy&searchtype=AND
https://www.youtube.com/channel/UCaGziSqm7m2mJ8FaJ7G709g
NI's TestStand:
https://forums.ni.com/t5/NI-TestStand/Diffrent-ATEasy-vs-TestStand/td-p/1096067?profile.language=en
Including additional lesser-known sensor data acquisition options:
Labjack: https://labjack.com/products/u6?gclid=EAIaIQobChMIsr6IuKz58gIVCm-GCh1cpgrtEAYYAiABEgK_OPD_BwE
Further considerations and rankings: https://www.janbasktraining.com/blog/what-is-data-acquisition/
(please see ActiveX tools here)
More considerations: https://www.capterra.com/sem-compare/electronic-data-capture-software/?utm_source=ps-google&utm_medium=ppc&gclid=EAIaIQobChMItNKAtK758gIVFkqGCh0fgA2REAAYBSAAEgKxafD_BwE
Get Guide: https://go.veeva.com/edc-evaluation-guide?utm_source=Google&utm_medium=PPC&utm_campaign=EDC+Evaluation+Guide
Data Acquisition Methods: https://www.usgs.gov/products/data-and-tools/data-management/data-acquisition-methods
Data Management Index: https://www.usgs.gov/products/data-and-tools/data-management/a-z-index
"Yes, we CAN":
https://www.taltech.com/data-acquisition-software?gclid=EAIaIQobChMIlOvg_MWw8wIVwOTjBx3OKgWBEAMYAiAAEgIyWvD_BwE
https://www.peak-system.com/?&L=1&gclid=EAIaIQobChMIlOvg_MWw8wIVwOTjBx3OKgWBEAMYASAAEgJwZ_D_BwE
https://www.campbellsci.com/sdm-can
https://www.accuratetechnologies.com/CANBusProducts
https://training.dewesoft.com/online/course/automotive-buses-can-measurement
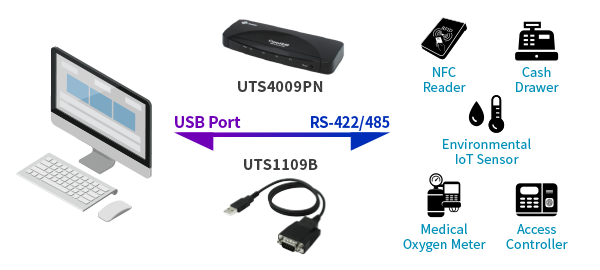
The SUNIX UTS series ComHub transform your USB port into asynchronous RS-422/485 serial ports for communication with serial devices.
https://www.sunix.com/upload/news/2022/20220407150527_uts-2.png
Compatible with both USB 2.0 and 1.1 specifications, SUNIX provides serial ports with transfer speed
up to 921.6Kbps. A quick, simple and cost-effective way to bring the advantages of data accessibility and mobile
solution for kinds of commercial and industrial automation applications.
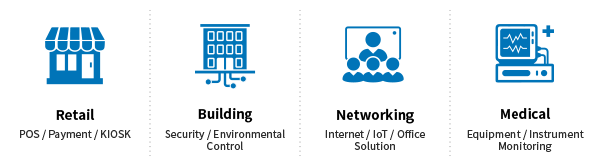
Versatile Applications
https://www.sunix.com/upload/news/2022/20220407092730_uts-3.png
RS-422/485 signal is ideal for long-distance communication. For example, our customer, an system integrator of building automation, chose to deploy
SUNIX UTS4009PN to smart building projects
due to the lack of Serial ports on their PC system, which needs to connect many
IoT devices.
|
|
For completeness and for nostalgia purposes (since we are familiar with
standard DoD applications too)
even though TK-MIP is definitely NOT for use with 1553 buses, click here to see
update in this area too. |
|
Rather than TeK Associates personalizing TK-MIP
software to a wide variety of different USER options beforehand, it
would be easier (for us) to let the USER
perform personalization themselves for the I/O hardware compatibility that they really want!
IMPORTANT: There exists an input signal simulator which can be used to realistically emulate a sequential vector input stream for purposes of initially verifying the computational behavior of
TK-MIP before a USER adapts TK-MIP to their preferred data acquisition I/O hardware, as recommended. |
Click here to view more of
the beauty of Arithmetic rather than of Mathematics, as claimed.
Go to Top |

{kind=link}
{kind=link}